






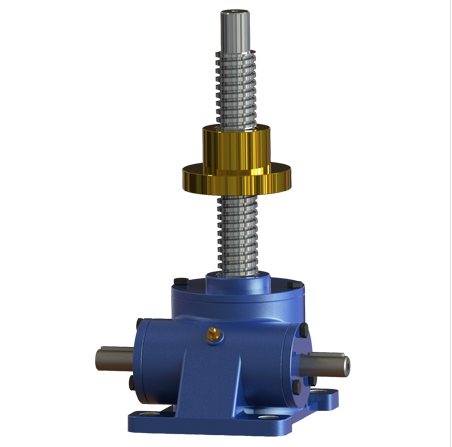
JRSS梯型丝杆升降机有TRSS35/JRSS40/JRSS50/TRSS60/TRSS70/TRSS100/TRSS120/TRSS130/TRSS150
有四种安装头部,本司可提供三维图。



|
产品说明 JRSS系列蜗轮丝杆升降机(又名千斤顶); JRSS螺旋升降机具有结构紧凑、体积小的特点; 安装方便、形式多; 可靠性高、寿命长; JRSS丝杆升降机具有起升、下降及借助辅件推进、翻转等多种功能; 可单台使用,也可多台组成使用; 动力源广泛,可用电动机或其它动力直接带动,也可以用手动; 通常用于低速重载的场合。广泛应用于冶金、机械、建筑、水利、医疗、化工等各个行业。 使用注意事项 请严格按承载能力表选择合适的速比和与之对应的具有充分裕度的载荷的升降机; 升降机工作时应控制减速机表面和升降螺母表面温度在-15℃~80℃; 升降机不得连续运转,单台升降机的负荷时间率(T%)以30分钟为单位计算,不得超过20%; 必须保证有充足的驱动源动力; JRSS丝杆升降机理论上有自锁功能,但在振动冲击较大的场合会造成自锁功能失灵,请务必加制动装置; 升降机使用环境:
JRSS螺旋升降机工作时一般不允许有横向载荷,若有横向载荷时,请加导向装置。 JRSS螺旋升降机(千斤顶)油品润滑 润滑油(脂)选用表
注:合成钙钠基润滑脂温度范围-20℃~100℃ 润滑油(脂)注油量(L)
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
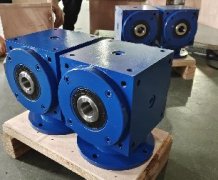
| 蜗轮蜗杆减速机设计中蜗轮齿数与蜗杆头数的选取 |
|
蜗杆传动是在空间交错的两轴间传递运动和动力的一种传动,两轴线间的夹角可为任意值,常用的为90°。这种传动由于具有结构紧凑、传动比大、传动平稳以及在一定的条件下具有可靠的自锁性等优点,它广泛应用在机床、汽车、仪器、起重运输机械、冶金机械及其它机器或设备中。 蜗轮蜗杆设计中蜗杆头数可根据要求的传动比和效率来选择,一般取z1=1-10,推荐 z1=1,2,4,6。 选择的原则是:当要求传动比较大,或要求传递大的转矩时,则z1取小值;要求传动自锁时取z1=1;要求具有高的传动效率,或高速传动时,则z1取较大值。 蜗轮齿数的多少,影响运转的平稳性,并受到两个限制:最少齿数应避免发生根切与干涉,理论上应使z2min≥17,但z2<26时,啮合区显著减小,影响平稳性,而在z2≥30时,则可始终保持有两对齿以上啮合,因之通常规定z2>28。另一方面z2也不能过多,当z2>80时(对于动力传动),蜗轮直径将增大过多,在结构上相应就须增大蜗杆两支承点间的跨距,影响蜗杆轴的刚度和啮合精度;对一定直径的蜗轮,如z2取得过多,模数m就减小甚多,将影响轮齿的弯曲强度;故对于动力传动,常用的范围为z2≈28-70。对于传递运动的传动,z2可达200、300,甚至可到1000。 |
| 蜗轮蜗杆减速机设计中蜗轮齿数与蜗杆头数的选取 |
|
蜗杆传动是在空间交错的两轴间传递运动和动力的一种传动,两轴线间的夹角可为任意值,常用的为90°。这种传动由于具有结构紧凑、传动比大、传动平稳以及在一定的条件下具有可靠的自锁性等优点,它广泛应用在机床、汽车、仪器、起重运输机械、冶金机械及其它机器或设备中。 蜗轮蜗杆设计中蜗杆头数可根据要求的传动比和效率来选择,一般取z1=1-10,推荐 z1=1,2,4,6。 选择的原则是:当要求传动比较大,或要求传递大的转矩时,则z1取小值;要求传动自锁时取z1=1;要求具有高的传动效率,或高速传动时,则z1取较大值。 蜗轮齿数的多少,影响运转的平稳性,并受到两个限制:最少齿数应避免发生根切与干涉,理论上应使z2min≥17,但z2<26时,啮合区显著减小,影响平稳性,而在z2≥30时,则可始终保持有两对齿以上啮合,因之通常规定z2>28。另一方面z2也不能过多,当z2>80时(对于动力传动),蜗轮直径将增大过多,在结构上相应就须增大蜗杆两支承点间的跨距,影响蜗杆轴的刚度和啮合精度;对一定直径的蜗轮,如z2取得过多,模数m就减小甚多,将影响轮齿的弯曲强度;故对于动力传动,常用的范围为z2≈28-70。对于传递运动的传动,z2可达200、300,甚至可到1000。 |
祥细尺寸,联系,15618373930